|
-
Building task-oriented relational representations for online
learning (McGovern, Lane, Fagg). Reinforcement learning provides a
suite of techniques designed for difficult control
problems yet the methods can be slow to converge and transferring
knowledge to larger problems is difficult. This research will
investigate the use of relational representations as one way to
overcome these issues. By representing the world as a set of objects
and relationships among these objects, agents can learn and
plan at a higher level. Students will develop relational
reinforcement learning methods for simulated and physical mobile
robotics domains. They will focus on developing techniques to
automatically create relational task-oriented knowledge
representations on a per task and per robot basis (Dabney and
McGovern, 2007; de Granville et al., 2006).
- Reinforcement Learning in Relational Environments (McGovern, Lane, Fagg).
Reinforcement learning has traditionally been plagued by slow
convergence rates and the inability to scale to large problem
domains. Recently, relational representations have been advocated as
one possibility for overcoming these barriers. In this project, the
students will investigate this cutting-edge research area by
developing relational reinforcement learning methods for simulated
mobile robotics domains. The students will begin by developing
simulators for such domains that employ relational representations --
e.g., systems that represent the concepts of ``wall'', ``door'',
``obstacle'', ``stair'', etc. directly rather than implicitly via a
traditional tabular transition function. Such a representation can be
dynamically interpreted at runtime to provide concrete transition
probabilities from any specific atomic state and, thus, a simulation
environment.
The
students will also tackle the building of learning agents situated in this
simulation environment and will be introduced to rigorous empirical
methodologies for evaluating the performance of learning agents. In
this phase, they will begin by adapting traditional learning methods
such as Q-learning or SARSA(lambda) into this environment by
instantiating relations to atomic state descriptions and tabulating Q
values for the realized states. Finally, the students will explore
the use of state generalization methods such as relational function
approximation.
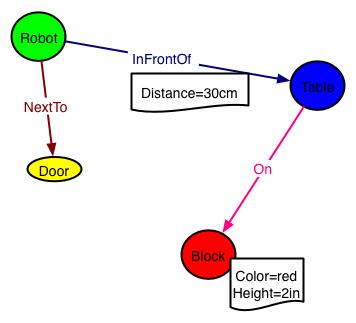
- Visualization of Evolving Relational Models (McGovern, Lane, Fagg, Weaver).
A key advantage of using relational representations in reinforcement
learning methods is that their evolutionary states can be readily
depicted in diagram form, opening up possibilities for visually
exploring and analyzing the structure and dynamics of the
reinforcement learning process. Using existing graph visualization
toolkits, students will develop and implement techniques and tools for
interactive visualization of relational reinforcement learning data
traces. Students will use these tools to evaluate and compare specific reinforcement
learning approaches in terms of scalability, convergence, parsimony,
sensibility, and variation as a function of both general learning
strategy and the particular computational parameter settings used
across simulation runs.
|