Force & Torque Based Grasping Controller
|
Brian Watson Andrew H. Fagg University of Oklahoma
|
|
|
Brian Watson Andrew H. Fagg University of Oklahoma
|
The F/T grasp controller is a series of control algorithms used to control the "Redundant Array of Inexpensive Digits". We have developed a simulation environment using VTK. In this environment, the contact force direction is simulated using the normal of the contact point. The controller program can either be used to control the real finger using a server- client manner or just to do simulated grasp by itself.
In this research, we mainly focused on the following problems:
Force & Torque residue control
In our simulations, a robot hand with three fingers is used. Each finger
has an F/T sensor at the bottom, so the wrench axis for each finger contact
can be calculated separately. The task is to grasp a cylinder with two concave
bottoms using either a two finger grasp or a three finger grasp, which is
decided at the beginning.
Two-finger grasp
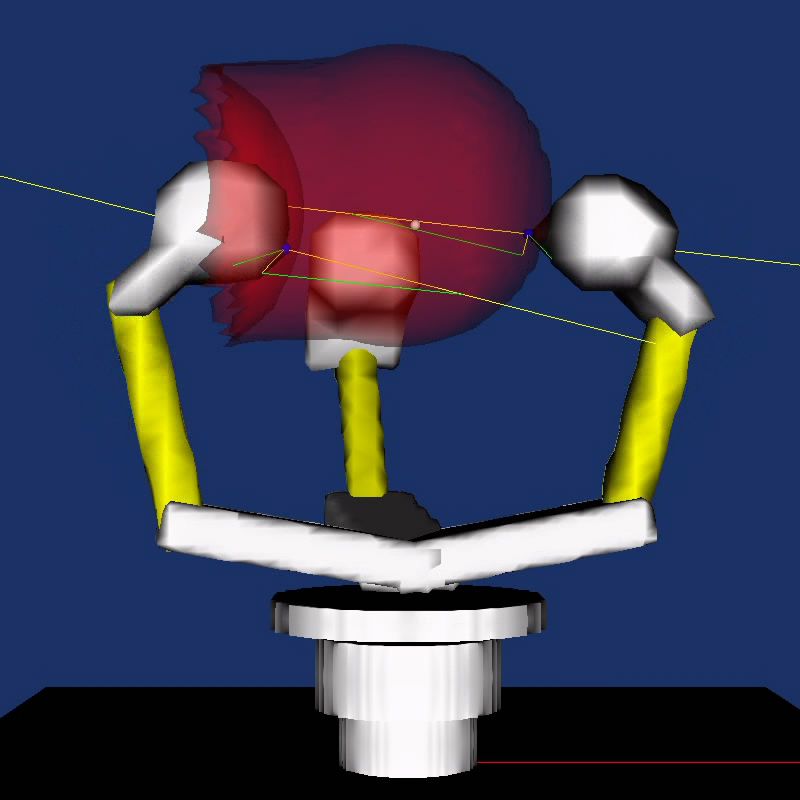
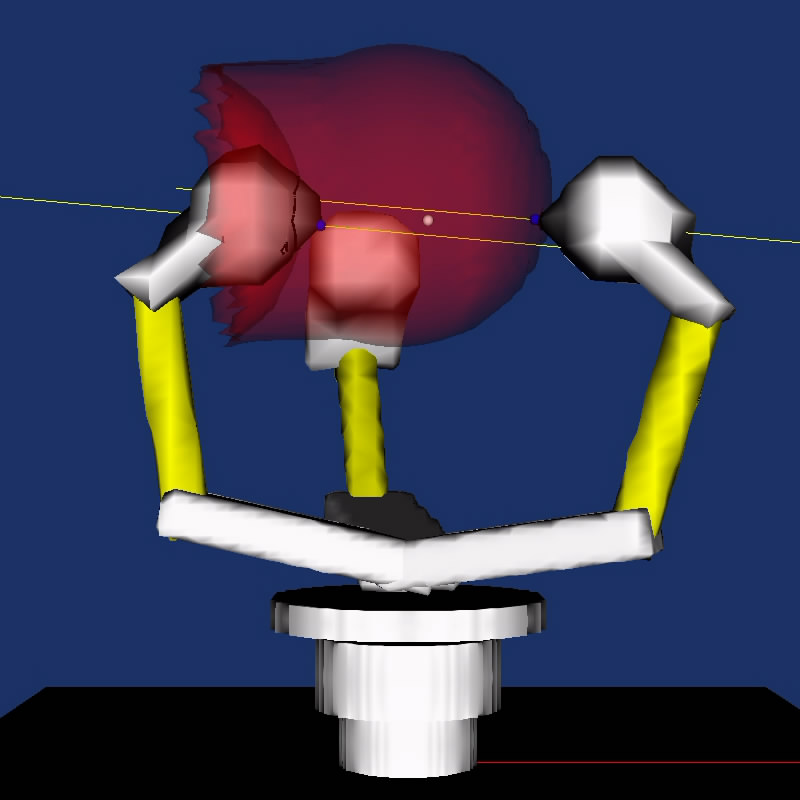
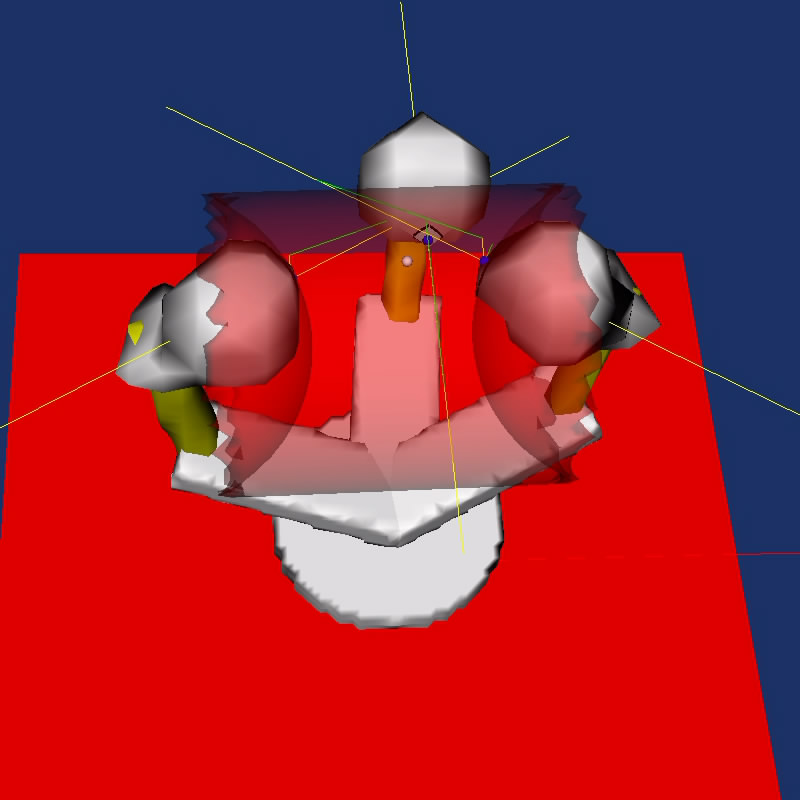
Figure 1 shows the first probe made by the fingers. Those long yellow lines
are wrench axis; short yellow lines are net forces, which should be the same
for all the fingers. Then net forces are projected to the plane perpendicular
to respective wrench axis, which gives the short green line, say, F-projected.
The white spot in the middle of the object is the rotation point used to
calculate moment. Its position is the average value of the central positions
of all the active finger tip spheres.
|
|
|
|
| |
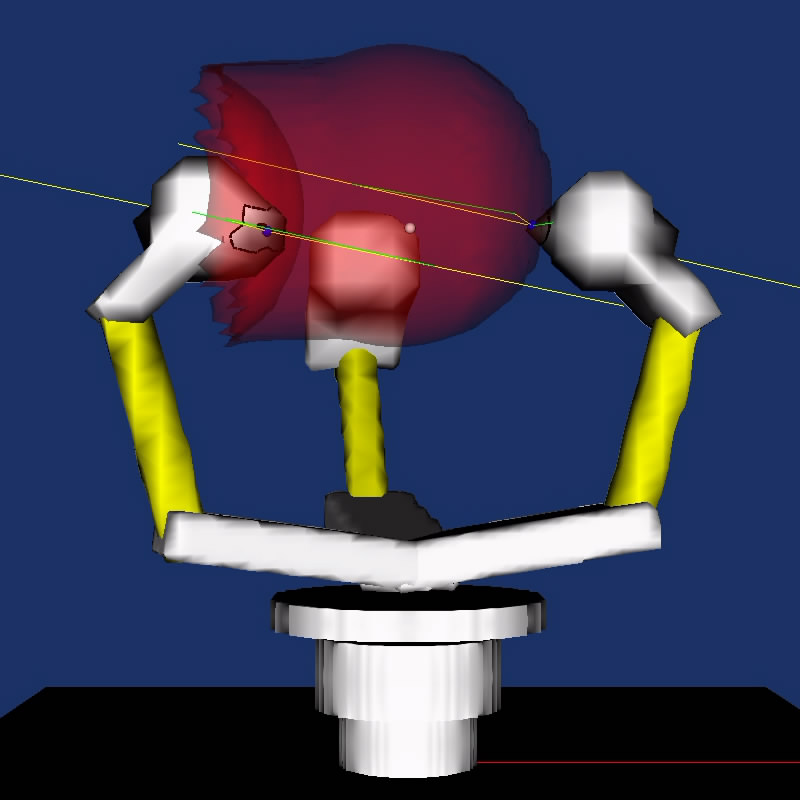
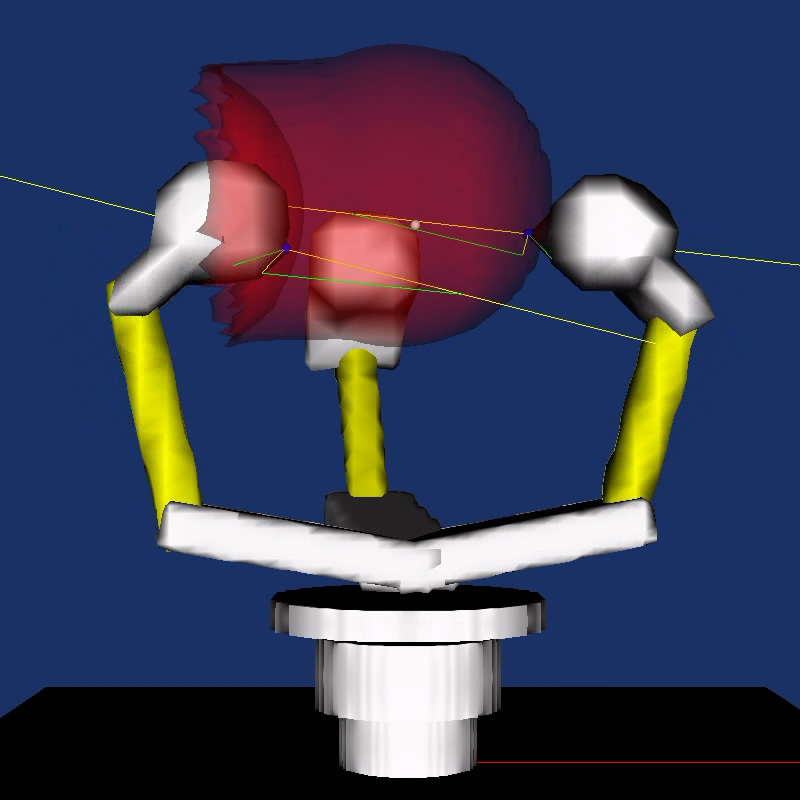
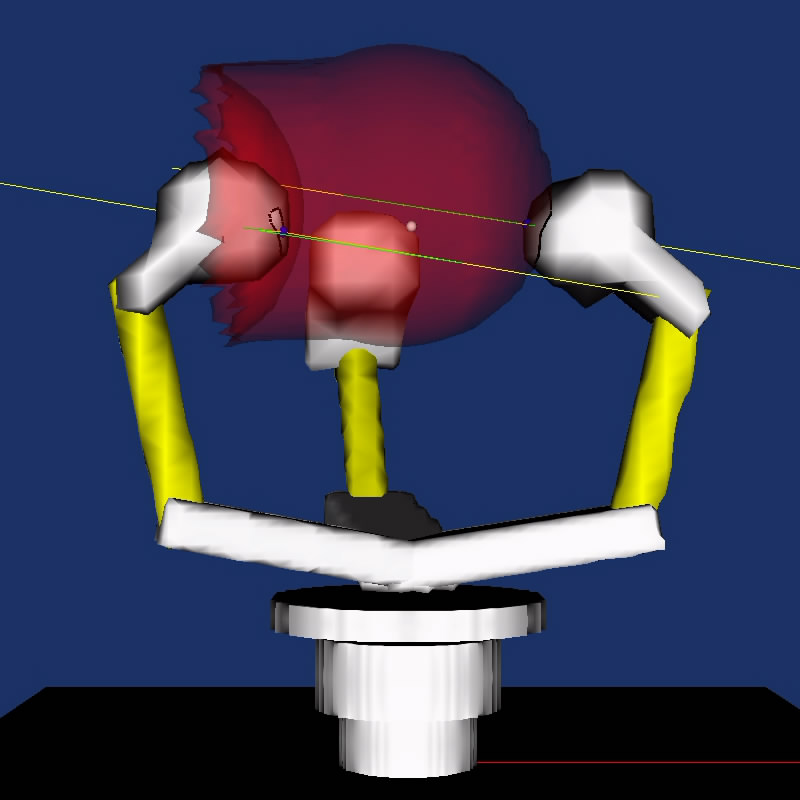
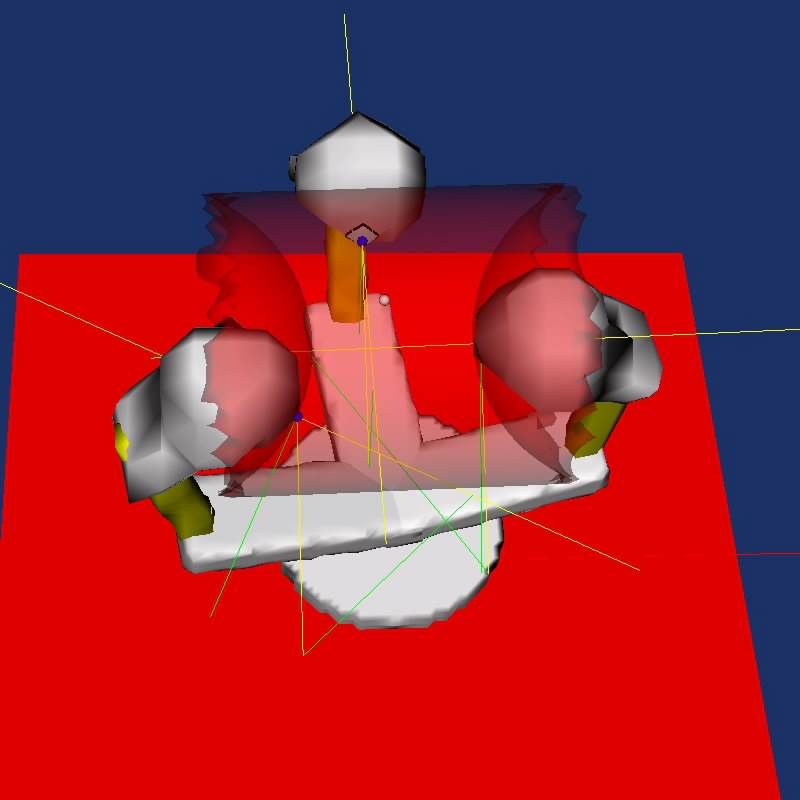
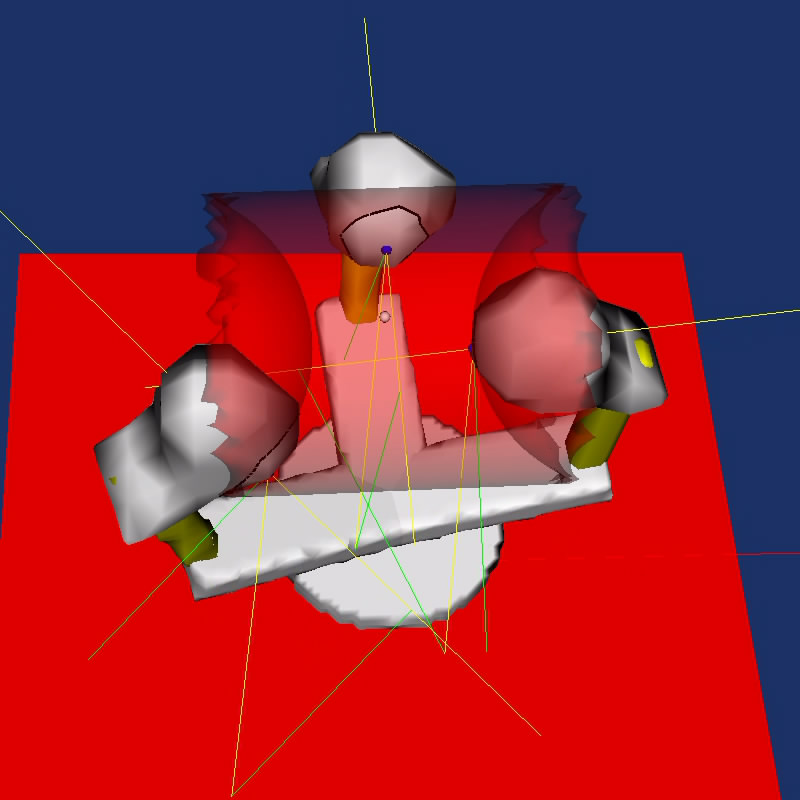
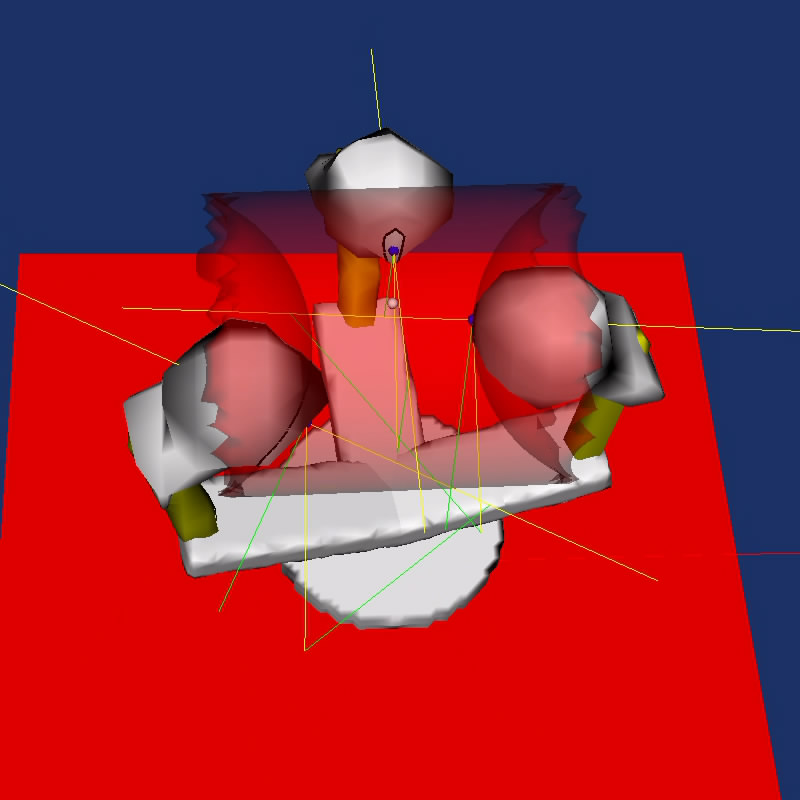
By comparing figure 1 & 2, we can see how force & moment control works. Without prior knowledge, the controller will simply assume a convex object, that is, both of the fingers will move along F-projected direction. After that, the controller will know if the local surface is convex or concave and move to the appropriate direction to reduce the net force. Figure 3 is taken from the 3rd probe, in which the net force is nearly zero but the net moment is still large. Finally, after several probes, the controller will reach a balance for both force and moment (Figure 4), which depends on the threshold we set.
|
|
|
|
| |
Three-finger grasp
In the three finger case, things are a little more complex. Figure 1, 2, 3 corresponds to
1st, 2nd, and 3rd probe. Again, net
force is increased at first and then reduced, because of the default
convex assumption. Figure 4 is the final configuration, in which both
net force and net moment are under predefined thresholds.
|
|
|
|
| |
|
|
|
|
| |
Last modified: Fri Sep 8 14:36:23 2006